ACM Computing Survey: 理解世界还是预测未来?世界模型全面综述
Sep 21, 2025世界模型作为人工智能迈向通用智能的重要方向,近年来受到广泛关注,涉及人工智能、心理学、计算机视觉、机器人技术、认知科学等多个学科。不同领域对世界模型的理解和应用方式虽各有差异,但都在推动这一概念的不断深化与拓展。
那么,究竟什么是世界模型?在本次研究中,清华大学电子系城市科学与计算研究中心团队系统回顾了相关领域的发展进展,提出了新的分类框架,并深入探讨了世界模型在不同场景下的典型实践。这一成果不仅为学术界提供了新的研究视角,也为实际应用开辟了新的思路。
论文链接:https://dl.acm.org/doi/10.1145/3746449
Github仓库:https://github.com/tsinghua-fib-lab/World-Model
从历史脉络来看,世界模型的思想最早可追溯到 20 世纪 60 年代 Minsky 提出的 框架理论(Frame System Theory),以及强化学习中用于建模环境动态的方法。进入深度学习时代,2018 年 Ha 等人提出的循环神经网络隐式模型,重新点燃了学界对世界模型的研究热情。近年来,随着 大语言模型(LLM)、自监督学习(JEPA 架构)、视频生成与交互式三维环境 等技术的快速发展,世界模型逐渐成为人工智能跨模态、跨任务的重要研究方向。
同时,世界模型的概念并非仅源自人工智能本身,而是深植于心理学与认知科学传统。早在 20 世纪 40 年代,Craik 就提出人脑会构建“小规模模型”来理解和预测外部事件;1980 年代,Johnson-Laird 系统化提出“心理模型理论(Mental Model)”,揭示了人类推理依赖于对不同可能世界的模拟。这些跨学科思想为当代人工智能的世界模型研究奠定了坚实的理论基础。
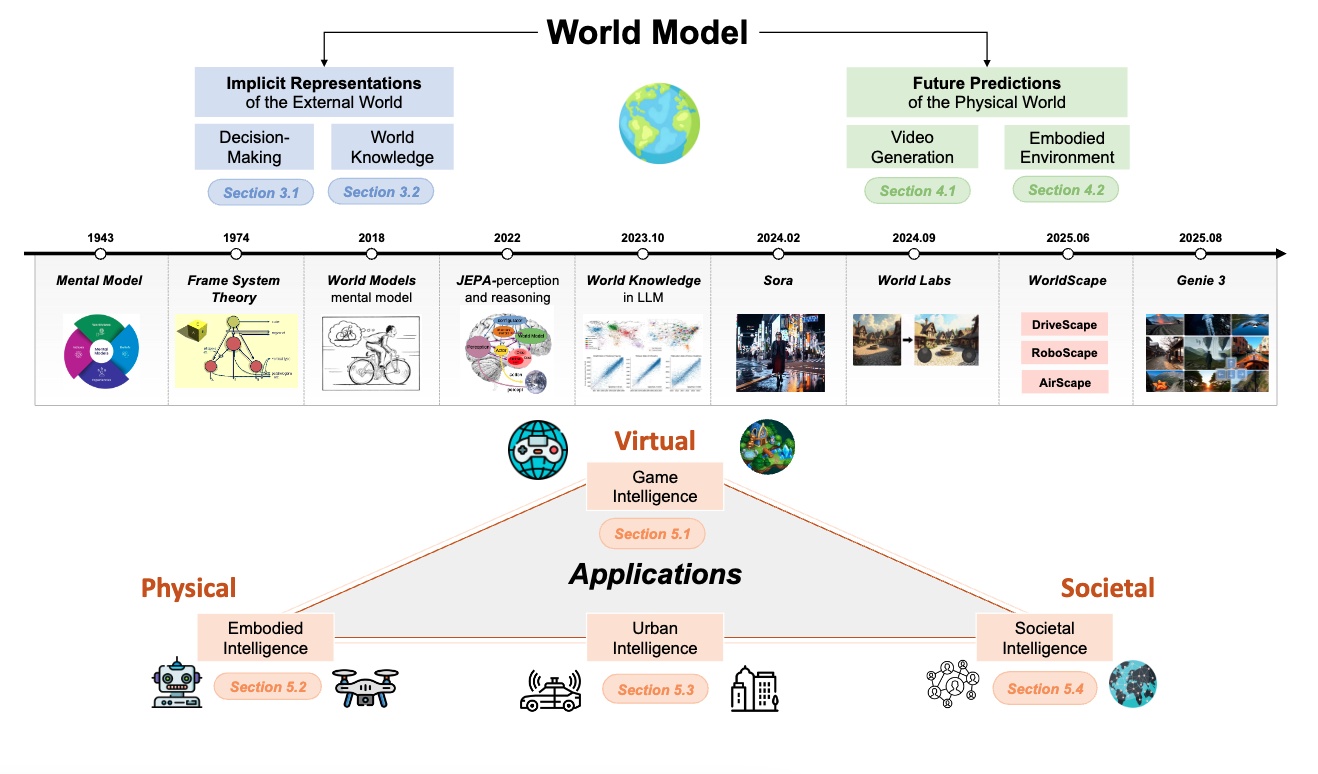
图1 本综述的总体框架。我们系统地定义了世界模型的本质目标,即理解外部世界的动态并预测未来情景。时间线展示了关键定义和应用的发展。
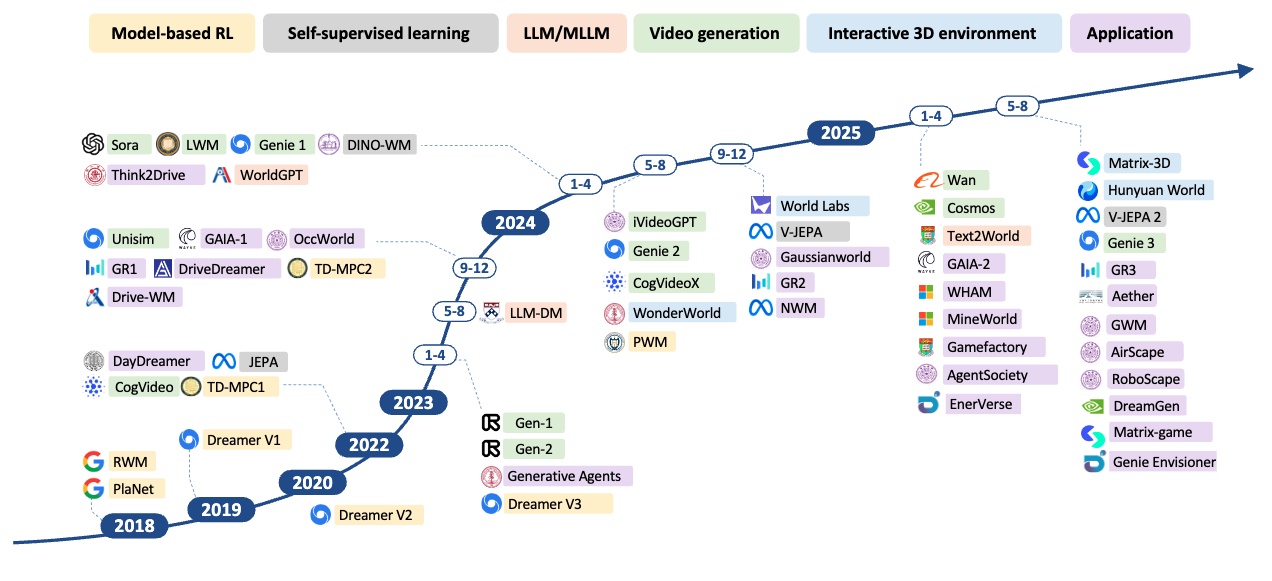
图2 深度学习时代世界模型相关技术、应用的发展路线图
该综述从历史脉络出发,系统总结了世界模型的发展,指出世界模型主要承担两大核心功能:1)理解外部世界的机制(internal representation);2)预测未来状态并辅助决策(future prediction),并提出了全新的分类框架,
- 隐式表示类世界模型:代表性方法包括基于模型的强化学习(MBRL)、侧重于存储世界知识的大语言模型和多模态模型,强调通过构建内在表示来理解外部世界的机制;
- 预测类世界模型:典型方向包括视频生成与交互式三维环境建模,更侧重于对未来状态的模拟与推演。
在此基础上,本研究总结了世界模型在三个关键应用场景的典型实践:
- 自动驾驶:通过建模交通环境与驾驶员行为,提升车辆在复杂交通条件下的感知与预测能力;
- 机器人:借助具身世界模型,支持机器人在真实环境中实现更高效的规划与操作;
- 社会模拟:利用世界模型增强代理/智能体,模拟群体行为和社会动态,助力理解复杂社会系统与决策过程。
论文进一步指出了未来的发展趋势:
- 长时预测与因果推理:提升复杂环境下的长期推演与因果建模能力;
- 跨模态融合与交互性:整合视觉、语言、动作等多源信息,增强模型与环境的实时交互能力;
- 具身智能与实际应用:推动在自动驾驶、机器人、社会仿真等领域的可靠落地;
- 理论框架与评测标准:建立统一的概念边界与评测体系,推动该领域的规范化与可持续发展。
相关成果以《理解世界还是预测未来?世界模型全面综述》(Understanding World or Predicting Future? A Comprehensive Survey of World Models)为题发表在 ACM Computing Surveys 上。该期刊 2024 年影响因子为 28.0,位列 Computer Science Theory & Methods 领域第 1/147。该研究得到了国家重点研发计划(2024YFC3307603) 与国家自然科学基金(62476152, U24B20180)等项目的支持。
值得一提的是,本项工作脱胎于课题组 2024 年 9 月举办的第 44 次技术研讨会(会议链接),并催生了 WorldScape 系列 世界模型研究,包括: