Nature子刊封面文章:基于深度强化学习的城市社区空间规划方法
Sep 26, 2023近日,清华大学电子系城市科学与计算研究中心与建筑学院跨学科合作,首次提出了强化学习的城市社区空间规划模型与方法,并实现了人类规划师与人工智能算法协作的城市规划流程,为智能城市的自动化规划提供了全新思路。
城市规划是一门既古老又年轻的学科,从城市诞生时就有了城市规划,而其理论与实践又在不断快速发展和完善。自上世纪中叶开始,城市科学领域的学者就一直在研究城市规划的自动化问题,通过开发城市计算模型及规划支持工具,努力将城市规划师从繁琐的工作中解放出来。比如美国系统科学家福雷斯特在1970年提出城市动力学模型,英国学者迈克尔·巴蒂在1995年提出规划支持系统。然而,由于数据、算法、算力等方面的限制,当前的规划实践中用地和道路布局仍然主要依靠人类规划师的经验和直觉,自动化程度很低。
随着人工智能技术在近10年的突破性发展,尤其是强化学习算法在巨大解空间中进行多目标优化的强大能力被发掘,很多之前依赖人类直觉的规划类问题(如围棋、芯片设计等)都得到了有效解决,这使得利用人工智能强大的计算能力进行土地利用和道路布局成为可能。开发人工智能支持的城市规划工具能够解放人类规划师的生产力,使人类规划师更加专注于创意性的工作,具有很大的科学与应用价值。

(a)用地布局的图表示。(b)道路布局的图表示

提出的强化学习模型(a)图神经网络状态编码器。(b)用地布局策略网络。(c)社区规划价值判断网络。(d)道路布局策略网络。(e)社区规划图上马尔科夫决策过程示意图
电子系城市科学与计算研究中心从2014年开始研究城市复杂环境中的治理、规划和决策问题。研究中心李勇副教授带领课题组博士生郑瑜等人,基于课题组在城市计算建模与深度强化学习等方向的技术积累,与建筑学院武廷海教授团队合作,创新地提出了基于深度强化学习的城市社区空间规划方法。通过在虚拟城市环境中数百万次的规划,提出的人工智能模型能够从海量数据中学习城市规划能力,不断优化空间效率,并最终达到超越人类专家的规划水平。另外,城市社区形式多样且不规则,无法使用在围棋和芯片设计等具有规则输入的任务中广泛采纳的卷积神经网络。为了克服这一难题,该方法首次从拓扑层面完成城市规划任务,使用图模型为任意形式的城市社区给出统一的表示,将城市规划转化为了图上马尔科夫决策过程,从而能够发挥深度强化学习算法在巨大解空间中高效搜索的能力,并实现城市社区用地和道路的智能布局。在北京两个社区的规划模拟实验表明,所提方法得到的社区规划方案能够显著提高“15分钟城市”的各项指标。同时,通过设计人类规划师与人工智能的协作工作流,能够大幅提升人类规划师的工作效率,高效地生成不同风格的社区规划方案。
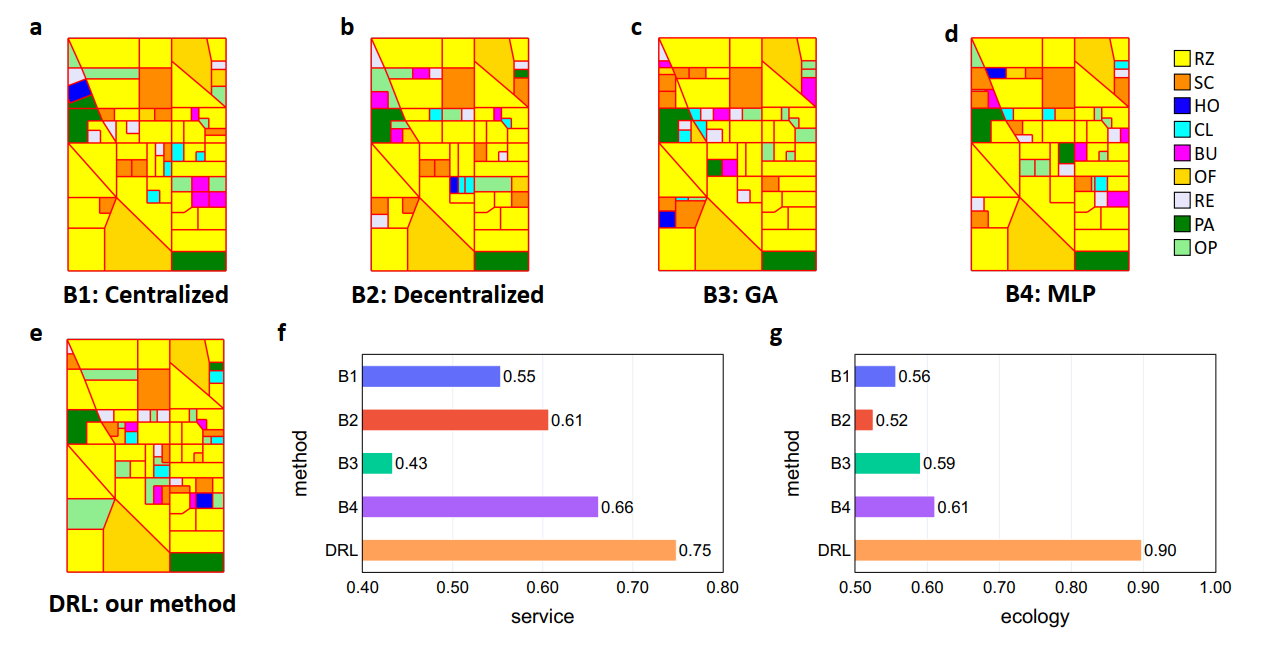
所提模型规划方案与已有算法性能对比(a-e)不同算法的规划方案:(a)中心化启发式方法,(b)去中心化启发式方法,(c)遗传算法,(d)多层感知机强化学习算法,(e)所提方法。(f-g)15分钟城市性能指标对比:(f)服务指标,(g)生态指标
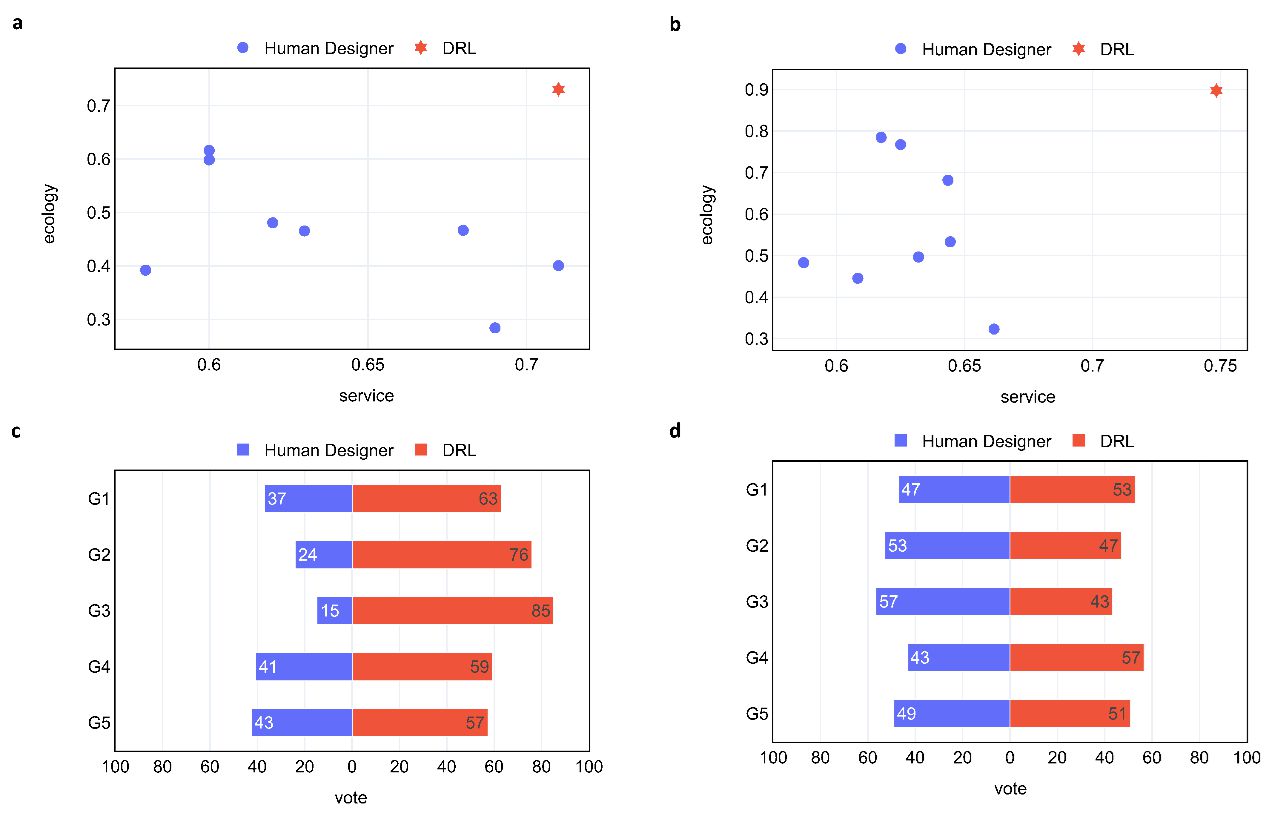
所提模型规划方案与人类专家性能对比(a-b)北京两社区服务与生态指标对比:(a)回龙观社区,(b)大红门社区。(c-d)北京两社区主观盲测结果:(c)回龙观社区,(d)大红门社区
相关成果以“基于深度强化学习的城市社区空间规划方法”(Spatial Planning of Urban Communities via Deep Reinforcement Learning)为题在《自然·计算科学》(Nature Computational Science)上在线发表,并被选为最新一期封面文章。该成果展示了人工智能技术在城市规划领域解决复杂规划问题的潜力,所建模型能够提高社区的空间效率,为“15分钟城市”的实现提供高效解决方案,助力城市的可持续发展。
清华大学电子系城市科学与计算研究中心博士生郑瑜为论文第一作者,李勇副教授为通信作者;清华大学电子系博士后研究员林雨铭,清华大学建筑学院赵亮副教授、武廷海教授,清华大学电子系金德鹏教授为共同作者。该研究成果得到科技创新2030—“新一代人工智能”重大项目,自然科学基金联合基金重点项目和自然科学基金面上项目的支持。
论文链接: